|
I am a final-year PhD student at UCSD, working with Prof. Xiaolong Wang. Before this, I received my BS/MS in mathematics and computer science at UIUC, where I worked with Prof. Kris Hauser and Prof. Yuxiong Wang. I love full-stack engineering. During my undergrad, I built things from flip-flops to a RISC-V CPU, from hand-written backprop in C++ to TensorRT, from STM32 to NVIDIA Jetson, and spent a happy year forming the Illini RoboMaster club in 2018. I spent a happy summer as a research intern at NVIDIA working with 🏎️ Erwin Coumans in 2025. Email:Google Scholar / Twitter / Github / LinkedIn / Cat Senpai |

|
News
|
|
My research interests lie in the intersection of robotics and computer vision. My research aims at enhancing the mobile manipulation capabilities of robots via CV methods. |


|
Xiongyi Cai*, Ri-Zhao Qiu*, Geng Chen, Lai Wei, Isabella Liu, Tianshu Huang, Xuxin Cheng, Xiaolong Wang ArXiV, 2025 project website / paper Pre-training and post-trainigng recipe to learn from human data. |
|
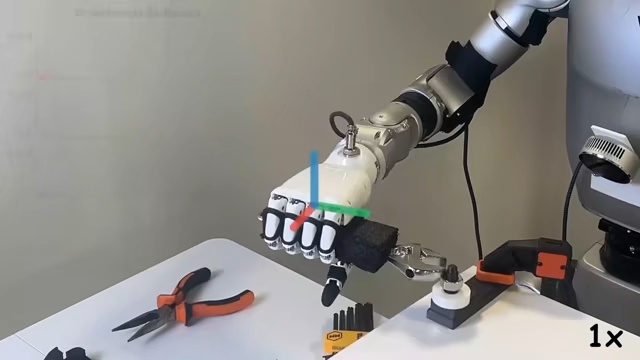
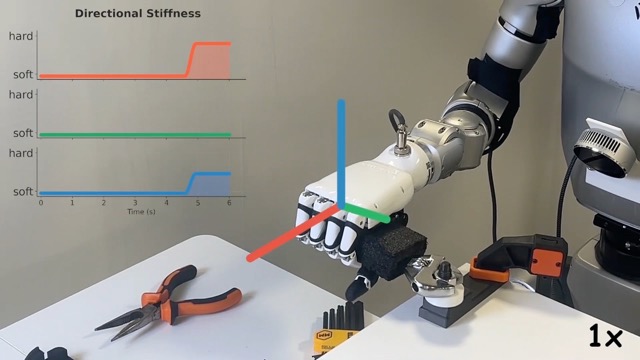
Lai Wei*, Xuanbin Peng*, Ri-Zhao Qiu, Tianshu Huang, Xuxin Cheng, Xiaolong Wang RSS Whole-body Control and Bimanual Manipulation Workshop, 2025 (Spotlight) project website / paper Two-stage heterogeneous meta-control for compliant humanoid bimanual manipulation. |


|
Guangqi Jiang*, Haoran Chang*, Ri-Zhao Qiu, Yutong Liang, Mazeyu Ji, Jiyue Zhu, Zhao Dong, Xueyan Zou, Xiaolong Wang ArXiV, 2025 project website / paper / code Photo-realistic simulation/evaluation suite for robotic manipulation. |
|
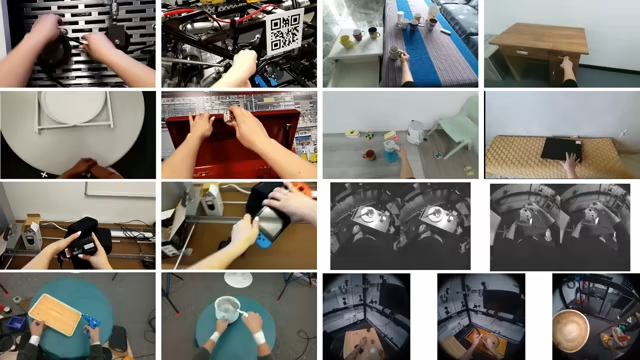
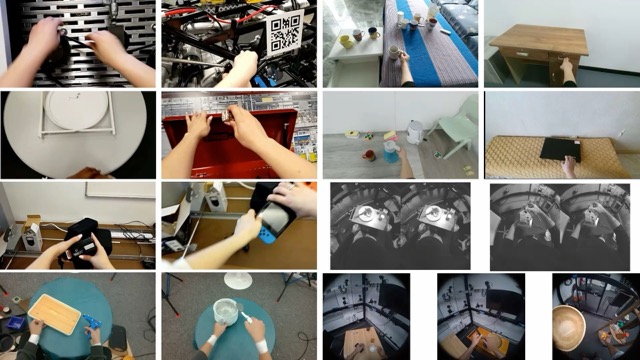
Ruihan Yang*, Qinxi Yu*, Yecheng Wu, Rui Yan, Borui Li, An-Chieh Cheng, Xueyan Zou, Yunhao Fang, Xuxin Cheng, Ri-Zhao Qiu, Hongxu Yin, Sifei Liu, Song Han, Yao Lu, Xiaolong Wang ArXiV, 2025 project website / paper / code (model) / code (sim) Dexterous VLA pre-training on diverse egocentric human manipulation videos. |


|
Ge Yan, Jiyue Zhu*, Yuquan Deng*, Shiqi Yang, Ri-Zhao Qiu, Xuxin Cheng, Marius Memmel, Ranjay Krishna†, Ankit Goyal†, Xiaolong Wang†, Dieter Fox† CoRL, 2025 project website / paper / code Consistency flow training for general robot manipulation policy. |
|
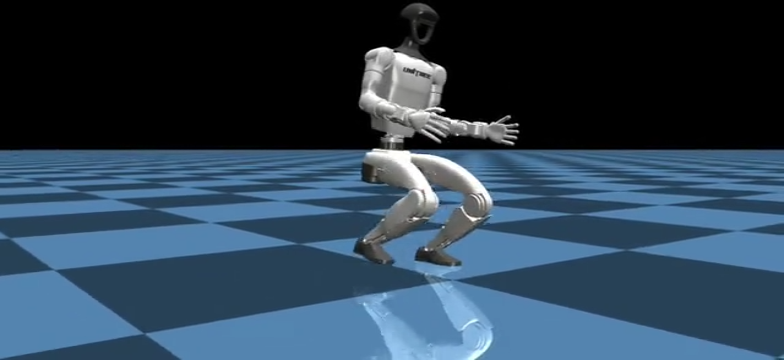
Jialong Li*, Xuxin Cheng*, Tianshu Huang*, Shiqi Yang, Ri-Zhao Qiu, Xiaolong Wang RSS, 2025 project website / paper / model example Dexterous humanoid whole-body control |

|
Ri-Zhao Qiu*, Shiqi Yang*, Xuxin Cheng*, Chaitanya Chawla*, Jialong Li, Tairan He, Ge Yan, David J. Yoon, Ryan Hoque, Lars Paulsen, Ge Yang, Jian Zhang, Sha Yi, Guanya Shi, Xiaolong Wang CoRL, 2025 project website / paper / code / data Egocentric human demonstrations as a data source for humanoid manipulation. |

|
Xueyan Zou, Yuchen Song, Ri-Zhao Qiu, Xuanbin Peng, Jianglong Ye, Sifei Liu, Xiaolong Wang ICLR, 2025 project website / paper / code Memory attention to substitute feature distillation. |

|
Ri-Zhao Qiu*, Yuchen Song*, Xuanbin Peng*, Sai Aneesh Suryadevara, Ge Yang, Minghuan Liu, Mazeyu Ji, Chengzhe Jia, Ruihan Yang, Xueyan Zou, Xiaolong Wang ICRA, 2025 project website / paper Long horizon loco-manipulation with LLM planner and learned wholebody skills. |


|
Ri-Zhao Qiu*, Yafei Hu*, Yuchen Song, Ge Yang, Yang Fu, Jianglong Ye, Jiteng Mu, Ruihan Yang, Nikolay Atanasov, Sebastian Scherer, Xiaolong Wang IROS, 2025 project website / paper Real-time Generalizable Feature Fields enable Mobile Manipulation. |


|
Mazeyu Ji*, Ri-Zhao Qiu*, Xueyan Zou, Xiaolong Wang CoRL, 2024 project website / paper / code Splatting features enable precise and efficient grasping in dynamic environments. |

|
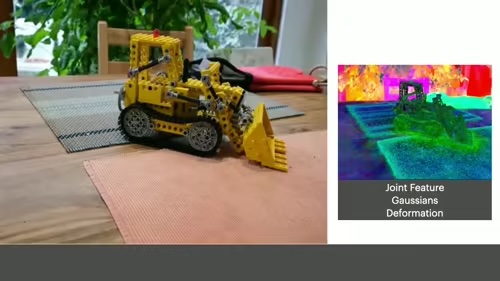
Ri-Zhao Qiu*, Ge Yang*, Weijia Zeng, Xiaolong Wang ECCV, 2024 project website / paper / code Synthesizing physics-based particle object motion via feature distillation and MPM. |


|
Minghuan Liu*, Zixuan Chen*, Xuxin Cheng, Yandong Ji, Ri-Zhao Qiu, Ruihan Yang, Xiaolong Wang CoRL, 2024 (Oral) project website / paper / code A sim-to-real framework that enables the robot to grasp different objects in varying surroundings. |
|
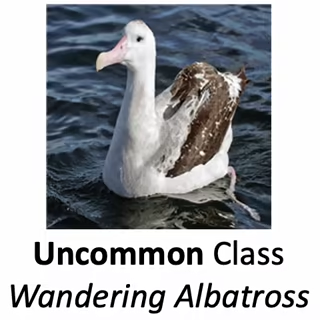
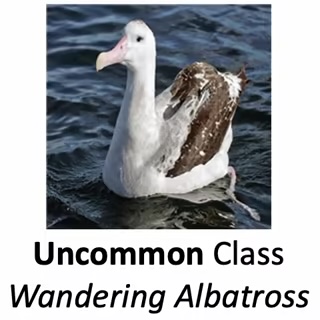
Ri-Zhao Qiu, Yu-Xiong Wang†, Kris Hauser† ECCV, 2024 (Oral) paper / code Align diffusion models for generation of images and masks of uncommon classes via few-shot conditioning. |
|
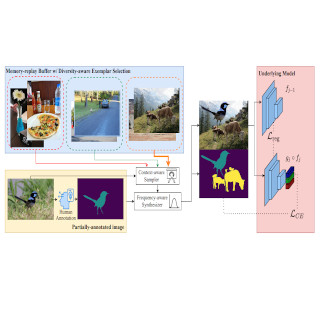
Ri-Zhao Qiu, Peiyi Chen, Wangzhe Sun, Yuxiong Wang, Kris Hauser CVPRW, 2023 Workshop on Learning with Limited Labelled Data code / paper We design a method that enables continual segmentation learning with few annotations via a guided data synthesis process. |
|
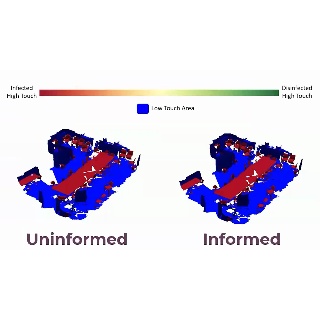
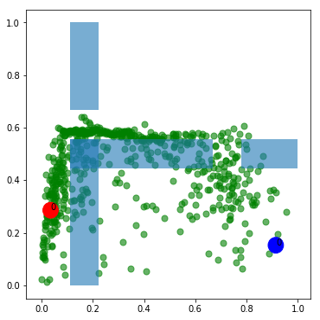
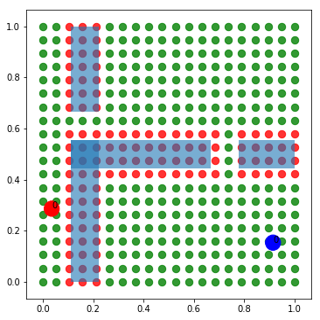
Ri-Zhao Qiu*, Yixiao Sun*, Joao Marcos Correia Marques, Kris Hauser IROS, 2022 (Oral) code / paper / video We design a disinfection system that can priortize cleaning of high-touch surfaces like human cleaners by co-designing perception and planning algorithms. |
|
|
 
|
Zuodong (Nickel) Liang*, Alvin Sun*, Ri-Zhao Qiu*, and other members of Illini Robomaster. RoboMaster Open-source Award, 2018 Project Page / Embedded Stack (2018) / Perception Stack (2018) / RM Vision 101 We designed and built robots from bolts and metal to perception algorithm. I mainly helped with writing STM32 application software and perception code. |
|
Ri-Zhao Qiu Personal Project, 2020 Codebase I implemented a codebase for robotics motion planning, which supports common problems like 2D narrow passage, bug traps, and robot arm grasping. It implements a variety of algorithms including RRT, RRT*, bRRT, PRM, FMT. In addition to uniform sampling, it also supports non-uniform sampler using conditional autoencoder. |
|
|
Reviewer for CVPR, ECCV, ICLR, CoRL, IROS, and RA-L.
|
Borrowed from Jon Barron's source code. |
